




クランプ付きマニピュレーター
導入
a) 同じ力のハードアームアシストマニピュレータは、2~500kgのさまざまな重量をバランスさせることができます。
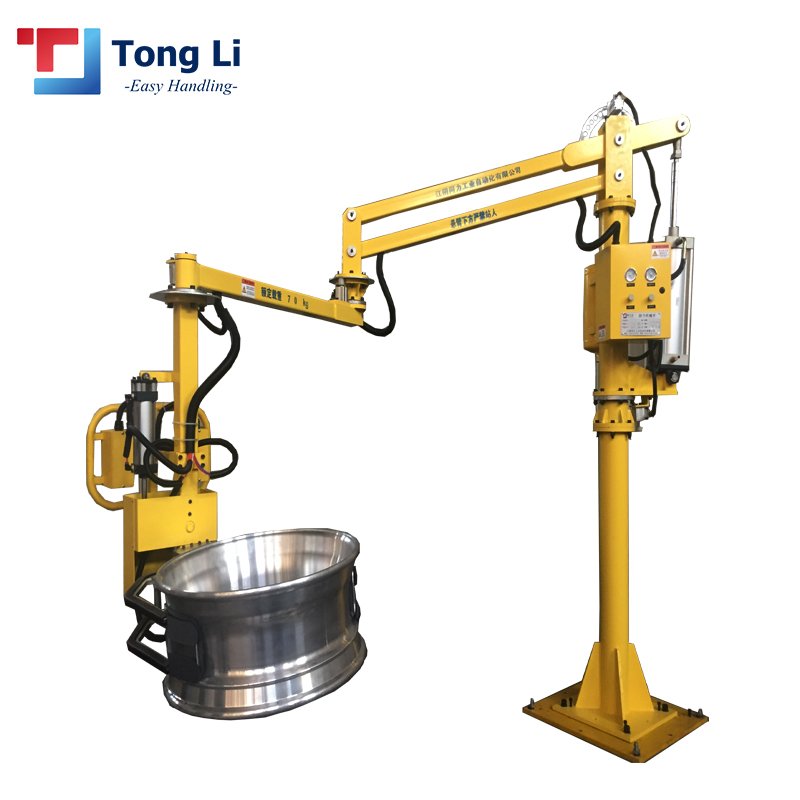
b) パワーアシストマニピュレータは、バランスホスト、把持治具、および設置構造から構成されます。
c) マニピュレータホストは、材料(またはワークピース)を空中に無重力で浮遊させる状態を実現する主な装置です。
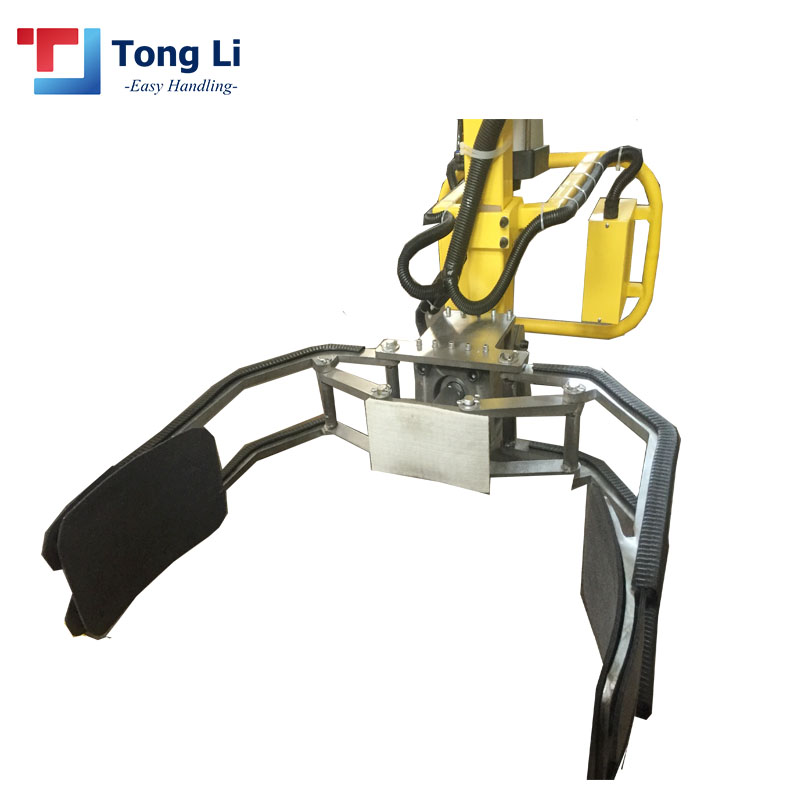
d) マニピュレータは、ワークピースの把持を実現し、ユーザーの対応する取り扱いおよび組み立ての要件を満たす装置です。
e) 設置構造は、ユーザーのサービスエリアや敷地条件に応じて、機器一式全体を支持する機構です。

| 機器モデル | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| 容量 | 50kg | 100kg | 200kg | 300kg |
| 作業半径 | 2500mm | 2500mm | 2500mm | 2500mm |
| 揚高 | 1500mm | 1500mm | 1500mm | 1500mm |
| 空気圧 | 0.5~0.8MPa | 0.5~0.8MPa | 0.5~0.8MPa | 0.5~0.8MPa |
| 回転角度A | 360° | 360° | 360° | 360° |
| 回転角度B | 300° | 300° | 300° | 300° |
| 回転角度C | 360° | 360° | 360° | 360° |






a) 異なる重量の材料の重力バランス状態を実現できるため、材料の精密な移送作業に適しています。
b) 無負荷、全負荷、異なるワークピースを処理する場合、システムは重量の変化を感知し、3次元空間での荷物の浮遊状態を実現できるため、正確な位置決めに便利です。
c) 完全なバランス、スムーズな動きなどの特性により、作業者はワークの取り扱い、位置決め、組み立てを容易に行うことができます。
d) 固定アームにより、マニピュレータは障害物を越えてワークピースを運ぶことができ、水平アームは、関連する場所での材料の水平配置と水平除去の要件を満たすことができます。
e) マニピュレータの頭部を常に水平に保ち、高い作業性を発揮します。
f) ジョイントブレーキ装置。複数の回転ジョイントを備え、広い範囲での材料のピックアップと配置を実現します。ブレーキ装置を備えているため、操作者は操作中にいつでもマニピュレーターの動きを中断できます。



このタイプの電動マニピュレーターは、最大500kgのワークピースを持ち上げることができます。作業半径は約2500mm、揚高は約1500mmです。持ち上げるワークピースの重量によって異なるため、ワークピースの最大重量に合わせて最小のタイプの機械を選択する必要があります。最大荷重200kgのマニピュレーターを使用して30kgのワークピースを運ぶと、操作性能は確かに良くなく、非常に重く感じます。装置には空気貯蔵タンクが標準装備されており、ガスが遮断された場合でも動作サイクルを完了できます。同時に、作業者に警告を発します。空気圧が一定程度低下すると、ワークピースの落下を防ぐためにセルフロック機能が起動します。マニピュレーターは安全システムを備えているため、ハンドリングの過程で、またはワークピースが安全なステーションに配置されていない場合、作業者はワークピースを放すことができません。ハードアーム型パワーマニピュレーターは、さまざまな非標準固定具を使用して、さまざまなプロセスアクションを簡単に完了できます。





